
- Dettagli
 Una caratteristica eccezionale di Arduino è il fatto di avere sul mercato una ricca scelta di schede aggiuntive (shield) che permettono di espandere notevolmente le funzionalità di Arduino e senza perdere ore e ore per i collegamenti e la configurazione hardware.
Una caratteristica eccezionale di Arduino è il fatto di avere sul mercato una ricca scelta di schede aggiuntive (shield) che permettono di espandere notevolmente le funzionalità di Arduino e senza perdere ore e ore per i collegamenti e la configurazione hardware.
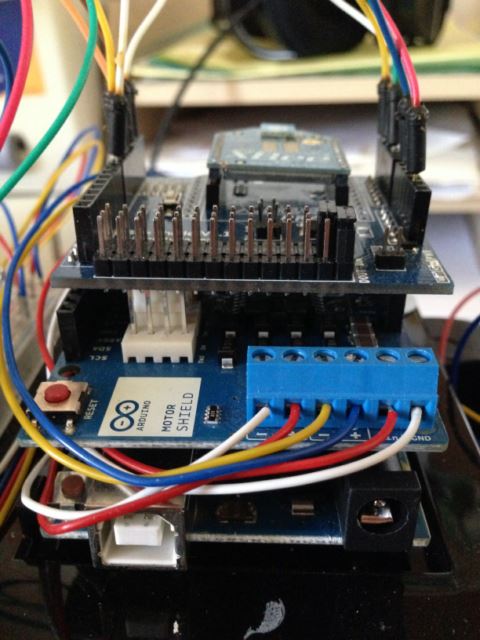
L'uso di shield compatibili con la scheda Arduino rende il tutto più semplice, basta infatti impilare le varie schede una sopra l'altra, come se fosse un sandwich!
Nel caso di questo progetto, ecco come ho impilato le shield:
| No. | Nome shield | Descrizione |
| 1 | Arduino UNO | Core shield che include la CPU e un collegamento USB (comunicazione PC) |
| 2 | Motor Shield | Scheda per il controllo dei motori |
| 3 | XBee Shield V1.1 | Scheda adapter per schedine XBee (wireless COM) |
| 4 | XBee module | Schedina XBee |
- Dettagli
Ora che abbiamo preparato tutti i componenti del progetto, possiamo dedicarci al collegamento elettrico di tutti i componenti.
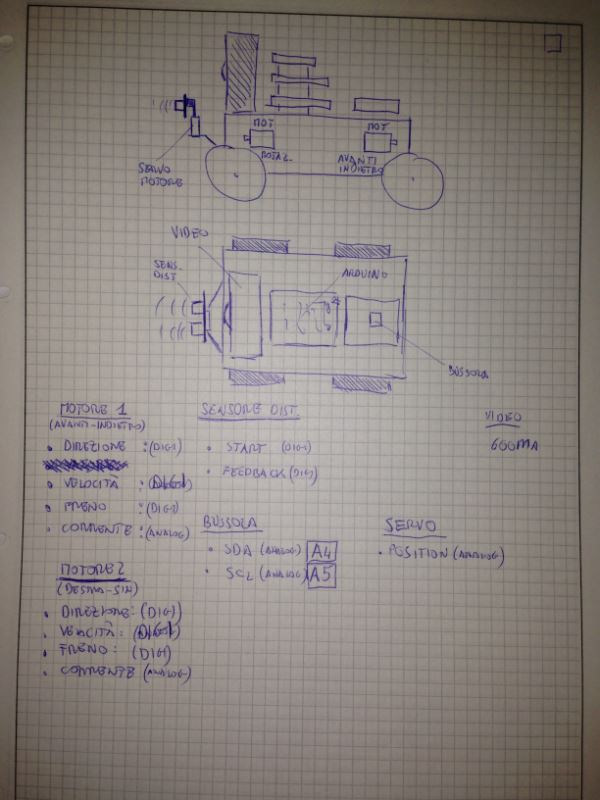
Essendo il numero di elementi aumentati man mano che prendeva forma il progetto, ho voluto schematizzare l'elenco di ingressi e uscite necessari e iniziare a distinguere i fabbisogni di porte analogiche e digitali. Questo è lo schizzo:
A questo scopo ho preparato anche uno schema dove ho riportato un po' tutti i collegamenti del mio progetto, alcuni collegamenti sono approssimativi per mancanza del disegno del componente corretto (ad esempio il display LCD), ma in linea di massima i collegamenti corrispondono.
Questo lo schema del progetto:
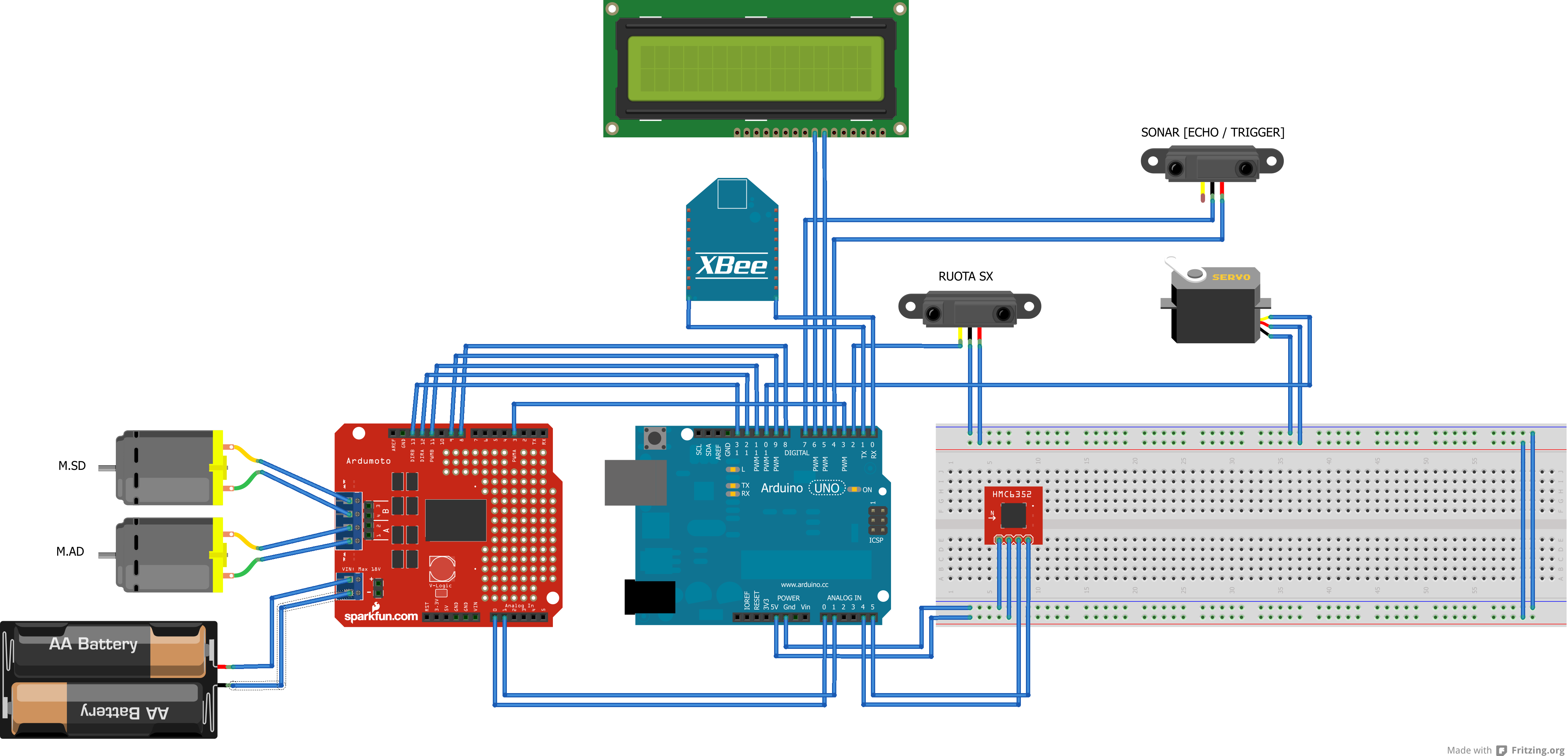
La tabella seguente mostra l'attribuzione delle rispettive porte con arduino, questo è molto importante in quanto tutto il software si riferisce a questa configurazione. Inoltre va ricordato che alcune porte di Arduino sono particolari e non possono essere invertite. Mi riferisco ad esempio alle funzioni PWM, disponibili soltanto su alcune porte o alle porte per la comunicazione tramite porta I2C.
| Progetto Big Wheely | |
| V1.0 | |
| Pin | Descrizione |
| D0 | RX Xbee Serial wireless |
| D1 | TX Xbee Serial wireless |
| D2 | Infrared rotazione Ruota SX [S.SX] |
| D3 | PWM AD - Rotor Shield |
| D4 | Trigger - HCRS04 Sonar distance |
| D5 | RX LCD display |
| D6 | TX LCD display |
| D7 | Echo - HCRS04 Sonar distance |
| D8 | Brake SD - Motor shield |
| D9 | Brake AD - Motor shield |
| D10 | Servo rotaz. Dist. Sonar |
| D11 | PWM SD - Motor shield |
| D12 | Direction AD - Motor shield |
| D13 | Direction SD - Motor shield |
| A0 | Current sensing AD - motor shield |
| A1 | Current sensing SD - motor shield |
| A2 | |
| A3 | |
| A4 | SDA (DATA) Bus I2C Compass |
| A5 | SCL (Clock) Bus I2C Compass |
Contrariamente a quanto iniziamente avevo pensato, il numero di porte disponibile su questo modello di Arduino non è così eccessivo. Sono infatti tutte utilizzate, ad eccezione di un paio di porte analogiche che però intendo sfruttare in futuro per il collegamento di pulsanti o altri sensori.
| [ ] | 10 kB |
- Dettagli
È giunto il momento di collegare un po' di fili e iniziare ad assemblare il progetto, in particolare vogliamo ora collegare il modulo che dovrà indicarci la direzione.
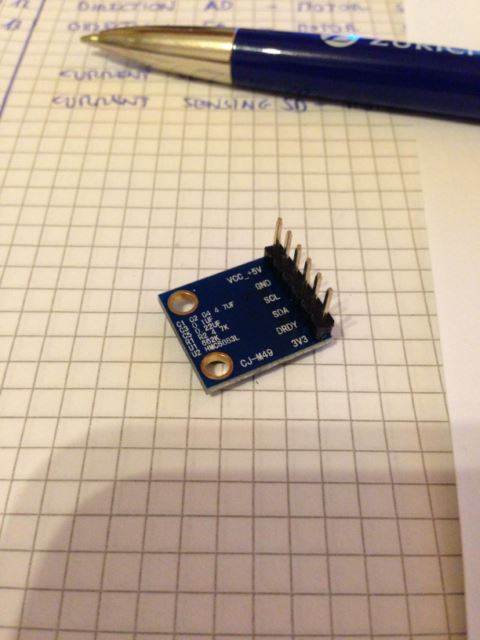
Il modulo HMC5883L è un minuscolo circuito con include solo una manciata di componenti che però implementa una vera e propria bussola!
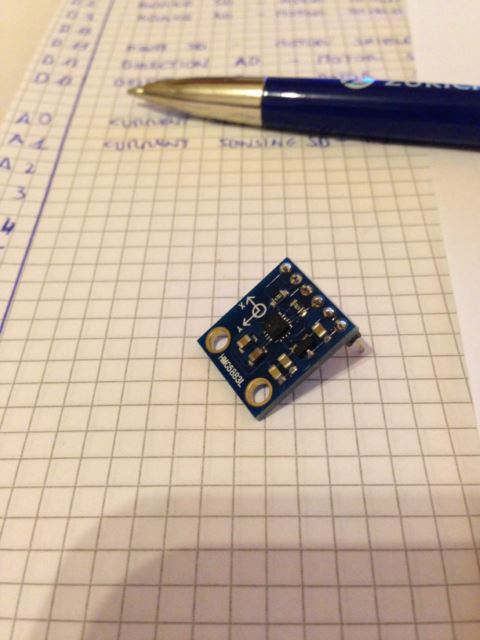
Questo componente è molto semplice da collegare ad Arduino, forse meno semplice è la sua gestione, ma questa è un'altra storia. Per ora limitiamoci a collegarlo, ecco come ho fatto io:
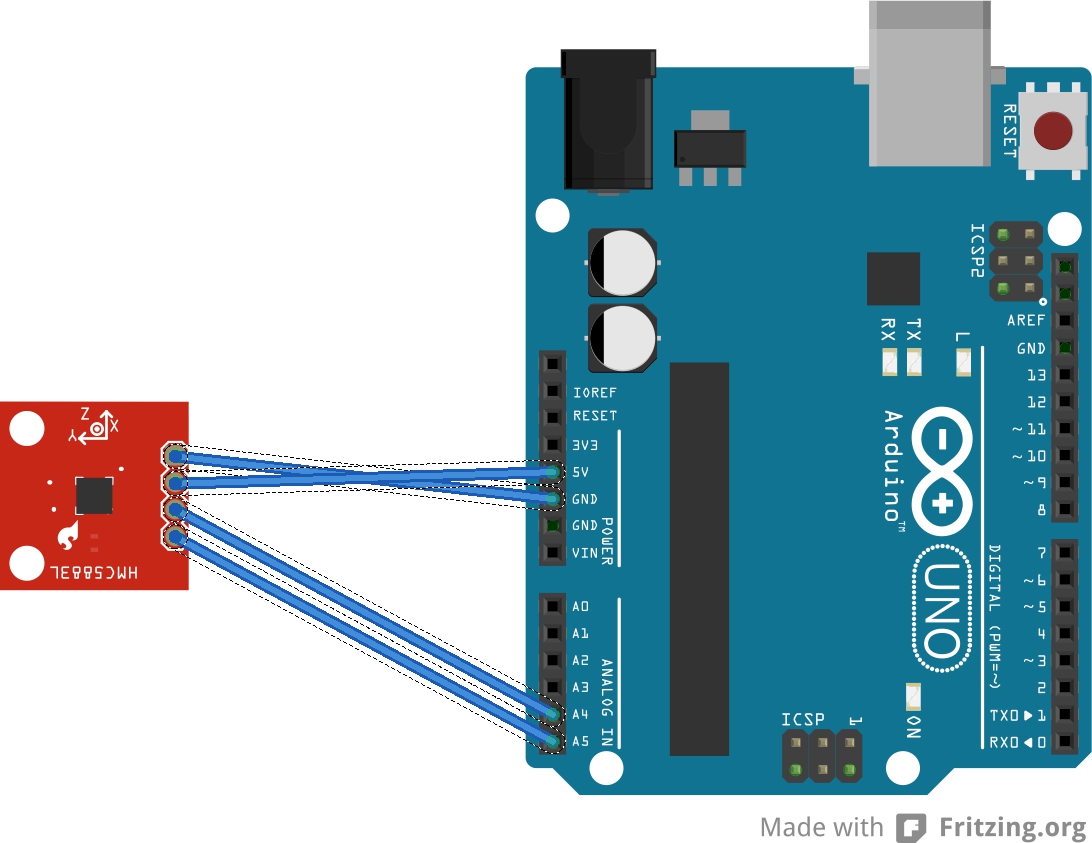
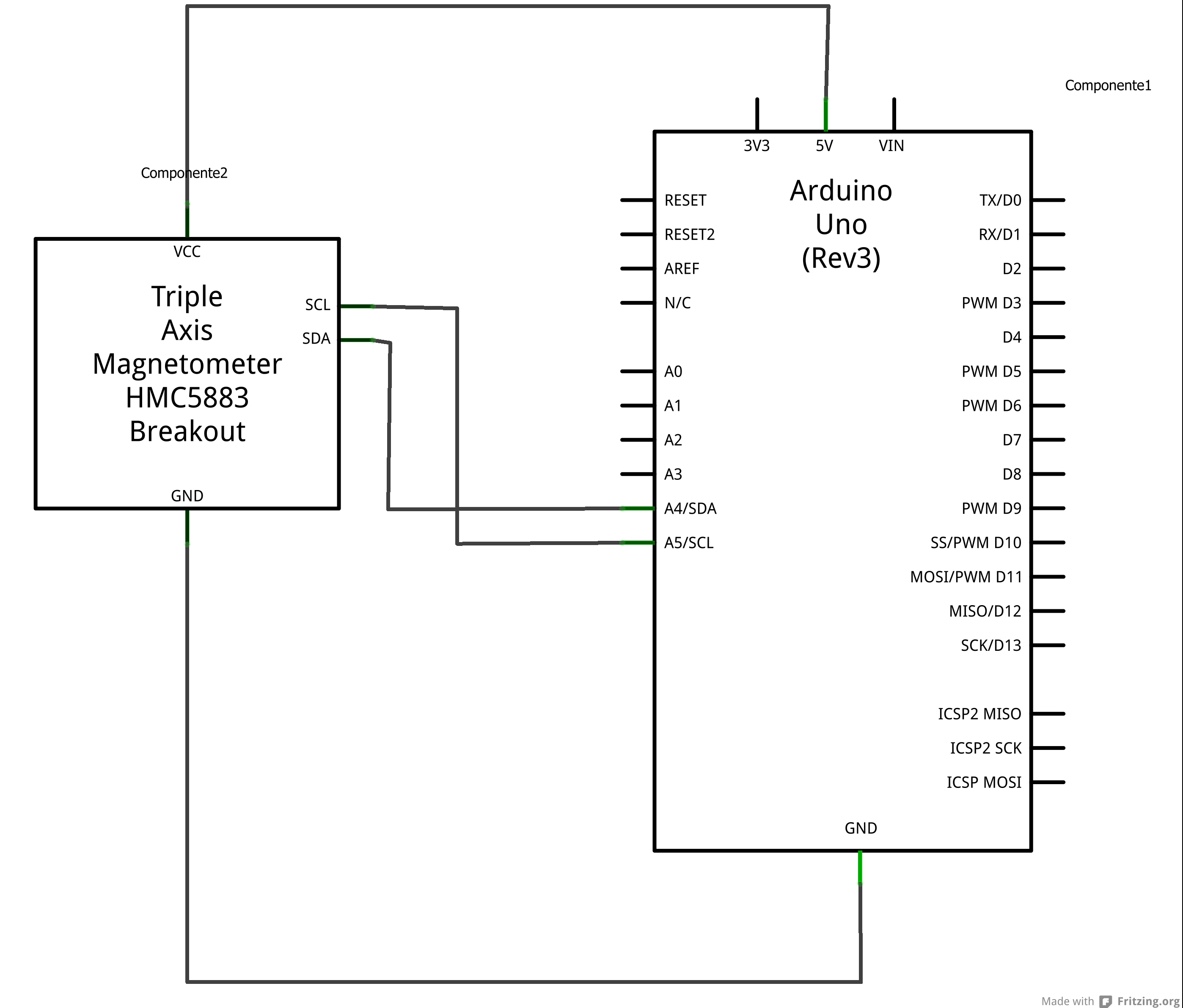
Il modulo che ho usato io dispone di 6 pin, oltre a quelli indicati nello schema ha un pin 3V3 (alimentazione a 3.3V invece che a 5V) e il pin DRDY, non usato nel nostro progetto.
- Dettagli
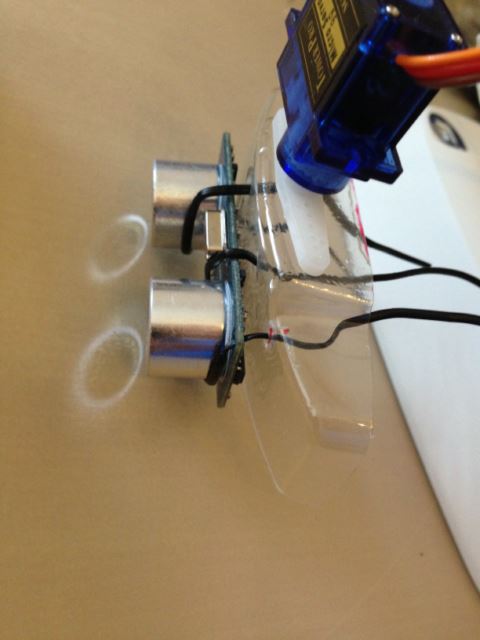
Il fissaggio del sensore di distanza (sonar) al micro servo non è semplice.
L'idea di base è quella di poter ruotare il sensore in modo da poter sfruttare un sensore solo per identificare gli ostacoli presenti davanti e laterali.
La scheda elettronica del sensore di distanza è molto compatta e malgrado siano presenti dei fori sulla scheda, è piuttosto difficile sfruttarli perchè sono molto piccoli. Inoltre non è possibile, o poco consigliato, montare il tutto su una struttura metallica.
La soluzione che ho trovato per ora è di utilizzare la plastica di imballaggio trasparente spesso utilizzata in molti acquisti.
Quella che ho utilizzato io è stata recuparata dalla confezione del deodorante per WC !!!
Sì, proprio così, questa:

Dopo averla ritagliata e apportato dei buchi in prossimità dei fori della schedina, ho fissato il sensore usando dei laccetti metallici (rivestiti di plastica)
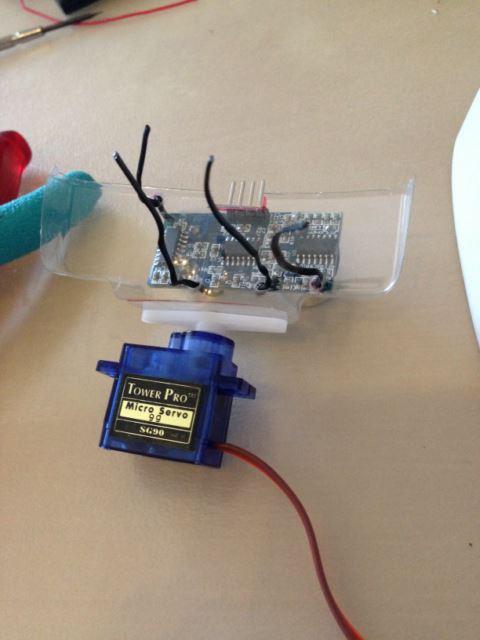
Ho potuto fissare il servo e il sensore nella parte superiore della webcam utilizzando una piastrina di alluminio
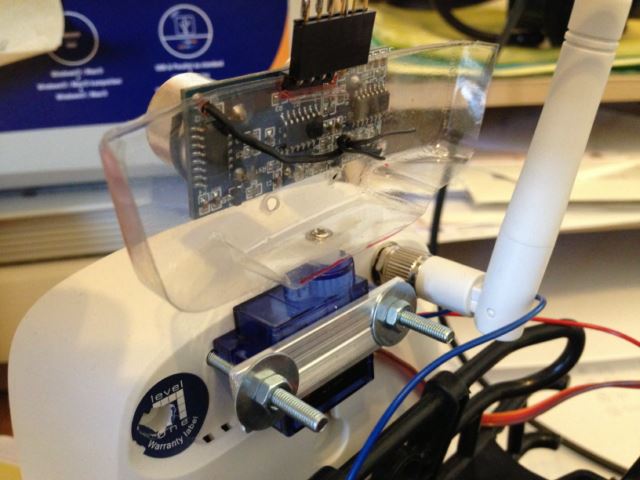
Mi rendo conto che questa soluzione non è ancora ottimale, sarebbe utile poter regolare l'inclinazione del sensore ma per ora è ancora un po' instabile, ma comunque per ora questo funziona già discretamente bene.
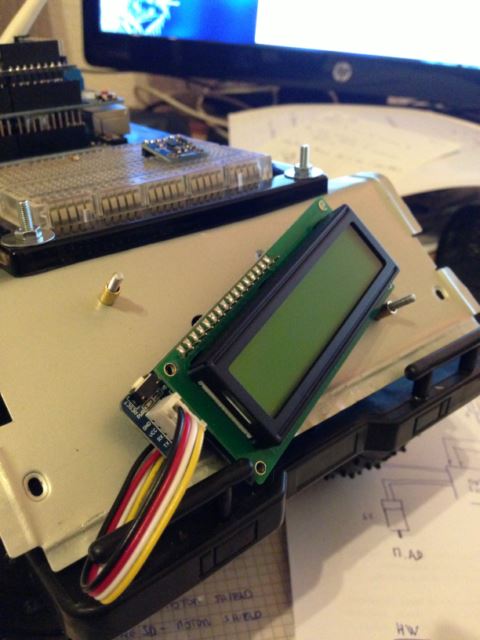
- Dettagli
Per fissare il display LCD era necessario avere un supporto piano e solido, ho quindi recuperato una piastra di ferro dal fondo di una vecchia tastiera!!







Pagina 4 di 6
- Sei qui:
-
Home

- Blog
