
Questa sera mi sono imbattuto in un vecchio problema che avevo già tentato di aggirare con qualche barbatrucco ma con scarsi risultati.
La lettura della rotazione della ruota funziona piuttosto bene fintanto che la ruona non si ferma proprio in corrispondenza della parte bianca (acceso). In questa posizione, il contatore di giri della ruota inizia a dare i numeri in modo del tutto casuale. Per un po' rimane fermo, poi inizia a contare in modo velocemente una serie di rotazioni, ... insomma, quando BigWheely è fermo in questa posizione il sistema diventa alquanto instabile.
Dopo uno sterminato numero di esperimenti ho capito che sembrano esserci diverse concause, quella più accreditata è un problema di disturbi di natura elettrica generati dal servo, che per mantenere la sua posizione viene gestito con impulsi in frequenza (PWM).
In alcune posizioni, il servo inizia a vibrare leggermente e ad emettere un ronzio, ho letto che spesso questo è normale, MA è proprio quando si verifica questo ronzio che è più probabile vi siano i conteggi della rotazione della ruota in modo incontrollato !
Sto tutt'ora cercando una soluzione, ho già tentato numerose strade ma senza sostanziali miglioramenti, attualmente sto verificando se può aiutarmi la soluzione proposta in questo articolo (Eliminare interferenze date dai servomotori).

Il test di rotazione di BigWheely sulla sedia ha ottenuto risultati sempre migliori, a partire dalle prime rilevazioni, fino alle compensazioni ottenute mediante le funzioni lineari.
Il software per la calibrazione di FreeIMU ha permesso di implementare un metodo semplice (e soprattutto leggero per Arduino) e in grado di correggere molto efficacemente i valori misurati dalla bussola.
I fenomeni e le tecniche per la compensazione dei compass è descritta abbondantemente in questo articolo, anche se lo sconsiglio perchè è piuttosto pesantino!!
Piuttosto consiglio l'articolo che allego, che spiega molto bene il fenomeno e approfondisce l'argomento, anche questo è un po' tecnico, ma è davvero molto interessante.
Calcolare gli offset di compensazione utilizzando Magneto
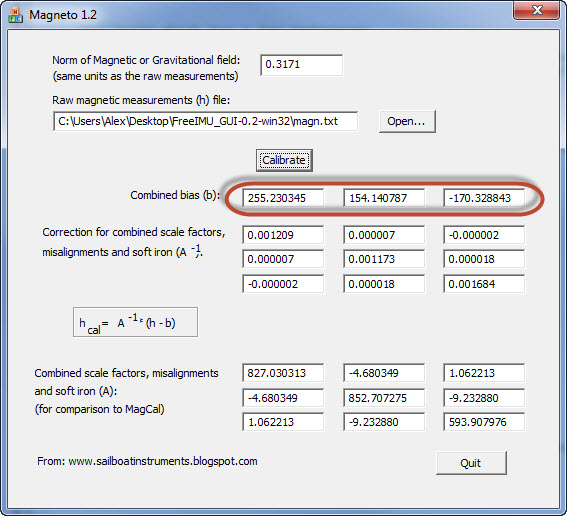
Magneto v1.2 è un piccolo software descritto su questo sito , che permette di calcolare gli offset in modo analogo a quello di FreeIMU, con la sostanziale differenza che non è necessario scaricare quasi 100 Mb di programma ma soli 400Kb (vedi allegato).
Il software permette di caricare dei tracciati (acquisizioni dati) fatti in precedenza, e di applicare l'algoritmo.
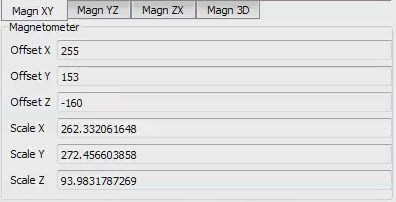
Io ho provato ad usare il tracciato generato dal software FreeIMU_GUI e ho ottenuto dei valori di offset praticamente identici.
risultati Magneto 1.2:
risultati FreeIMU_GUI:
Questo è il video del comportamento del compass dopo aver applicato gli offset calcolati mediante il software di FreeIMU o Magneto.
Dopo avere preparato tutti i tool necessari, ho preparato BigWheely nella stessa posizione dei test precedenti, ovveros su una sedia girevole.

Ora ho iniziato a campionare i dati tramite il FreeIMU calibration GUI, nel frattempo ruotavo lentamente la sedia.
Ecco il video della campionatura dei valori:
Al termine dell'acquisizione, e premuto il pulsante Calibrate, il programma calcola automaticamente gli offset di correzione.
Molto interessante è il fatto che i dati trasmessi da Arduino vengono salvati in un file, questo si chiama magn.txt e si trova all'interno della cartella principale del programma.
Io allego il file della mia acquisizione.
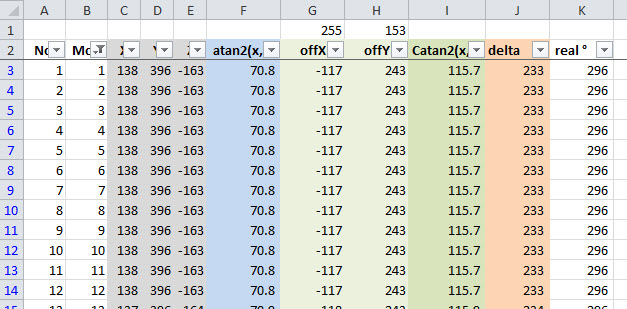
Ho approfondito la lettura e l'interpretazione di questi dati, riportandoli in un foglio excel e applicando le correzioni calcolate, in modo da vedere graficamente il risultato:
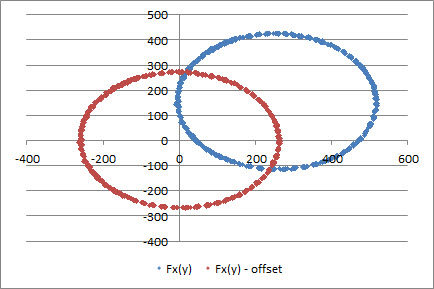
Mettendo in relazione i valori X e Y acquisiti dal compass è possibile visualizzare il cerchio più volte descritto durante lo studio dell'algoritmo per la calibrazione. Il grafico seguente rappresenta Fx(y).
Il cerchio BLU indica i dati acquisiti,senza correzioni, mentre il cerchio ROSSO indica i valori dopo aver applicato l'offset calcolato (per X e Y).
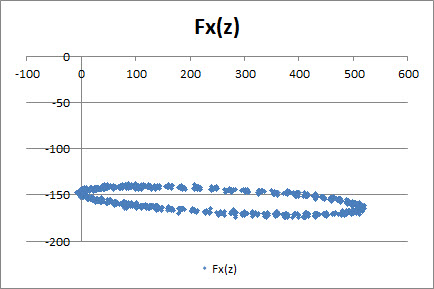
Per curiosità ho analizzato anche i dati di Fx(z), questo mostra la deviazione rispetto l'asse z.
Idealmente avrei dovuto vedere una semplice riga e non un ellisse come mostrato nel grafico seguente.
In realtà un piccolo scompenso esiste anche qui, ma per ora vorrei poter trascurare questo "errore" in quanto non è molto accentuato. Nel caso in cui avessi utilizzato il compass nelle tre dimensioni, avrei dovuto da subito tenerne conto, ma nel progetto BigWheely, l'inclinazione dell'asse z non cambia mai (si muove su superfici piane !).
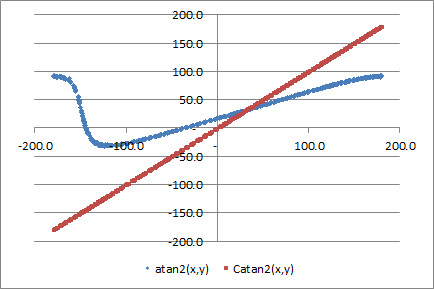
Nel grafico seguente ho voluto mettere in relazione l'angolo di rotazione con l'arcotangente calcolata tra gli assi X e Y.
Si può notare che l'arcotangente tra i 2 vettori non è lineare in funzione della rotazione di BigWheely.
Questo è proprio il fenomeno riscontrato negli esperimenti precedenti, per cui l'indicazione dell'angolo sembra impazzire durante la rotazione (vedi test precedenti).
La linea ROSSA mostra invece il comportamento ideale. Il valore compensato dovrebbe avvicinarsi a questa linea di tendenza.
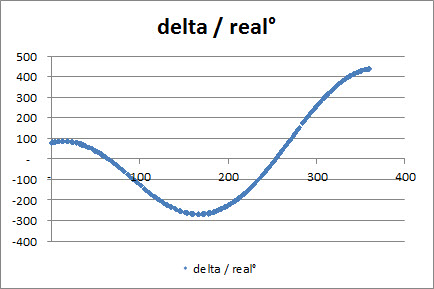
Ho voluto infine mettere in relazione l'errore generato in funzione della rotazione, si può notare come in prossimità di alcuni angoli la differenza è pressochè nulla (es. 70° e 150°) , mentre in altre posizioni, l'errore si manifesta notevolmente.
L'applicazione permette infine di esportare i valori di compensazione in un file, questo è pensato per l'utilizzo con il modulo FreeIMU, ma questi dati saranno certamente utili al momento di integrarli nel futuro firmware di BigWheely.
/**
* FreeIMU calibration header. Automatically generated by FreeIMU_GUI.
* Do not edit manually unless you know what you are doing.
*/
#define CALIBRATION_H
const int acc_off_x = 0;
const int acc_off_y = 0;
const int acc_off_z = 0;
const float acc_scale_x = 0.665659;
const float acc_scale_y = nan;
const float acc_scale_z = nan;
const int magn_off_x = 255;
const int magn_off_y = 153;
const int magn_off_z = -160;
const float magn_scale_x = 262.332062;
const float magn_scale_y = 272.456604;
const float magn_scale_z = 93.983179;
| [ ] | 298 kB |
Sto facendo alcuni test per trovare il modo di migliorare la lettura del modulo bussola (HMC5887L) in quanto i risultati ottenuti finora anche se non sono pessimi, non mi soddisfano ancora.
Ho trovato un interessante GUI per la visualizzazione dei dati raccolti dal modulo compass che si basa sulle librerie FreeIMU.
Ho quindi tentato di utilizzarlo sulla mia configurazione, sono infatti riuscito abbastanza semplicemente ad utilizzare questo software e poter testare in tempo reale i valori registrati dal modulo compass e visualizzarli.
Ecco i passi necessari:
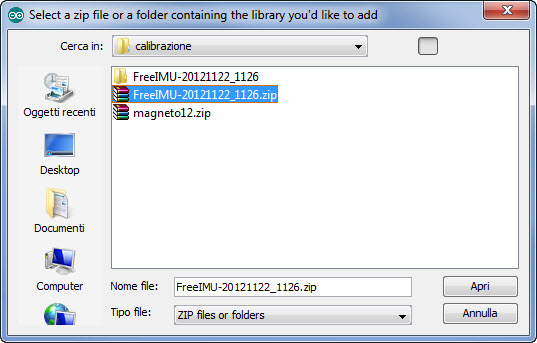
1) Installare le librerie FreeIMU
Scaricare la libreria FreeIMU e salvarla sul computer. Io l'ho allegata a questo articolo (vedi in fondo all'articolo, ma può essere scaricata anche dal sito che descrive questo progetto.
Quindi aprire il software Arduino e installare la libreria:
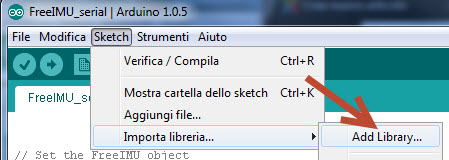
A questo punto si dovrebbe caricare lo sketch FreeIMU_serial.ino, ma stranamente c'erano degli errori in questo esempio per la quale non funziona correttamente con il software di calibrazione, percui caricate lo sketch che allego (versione corretta).
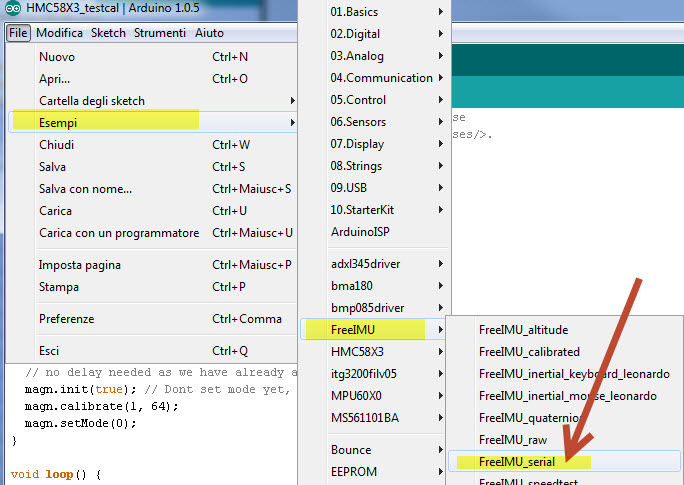
ATTENZIONE: Caricare lo sketch allegato, e non quello di esempio!
Caricare questo sketch su Arduino
2) Scaricare e avviare FreeIMU Magnetometer and Accelerometer Calibration GUI
Scaricare e avviare il software FreeIMU Magnetometer and Accelerometer Calibration GUI (circa 90Mb)

3) Connessione Arduino - GUI e test
Il sistema è ora pronto per inizia l'acquisizione dei dati.
Inserire il nome della porta su cui è collegato Arduino, quindi premere il tasto Connect. Se la porta è corretta, nella finestra command appare la scritta "Arduino serial port opened correctly".
Se tutto è corretto (importante che su Arduino sia in esecuzione lo sketch corretto), nella parte inferiore della GUI dopo qualche secondo appare il messaggio:
"Connected to: FreeIMU library by Fabio Varesano - varesano.net, FREQ:16 MHz, LIB_Version: 20121122, IMU: FreeIMU v0.4"
e si attiva il pulsante Start Sampling, l'acquisizione dei dati inizia!
| [ ] | 3148 kB | |
| [ ] | 5 kB |
Pagina 1 di 7
