
Ora che abbiamo preparato tutti i componenti del progetto, possiamo dedicarci al collegamento elettrico di tutti i componenti.
Essendo il numero di elementi aumentati man mano che prendeva forma il progetto, ho voluto schematizzare l'elenco di ingressi e uscite necessari e iniziare a distinguere i fabbisogni di porte analogiche e digitali. Questo è lo schizzo:
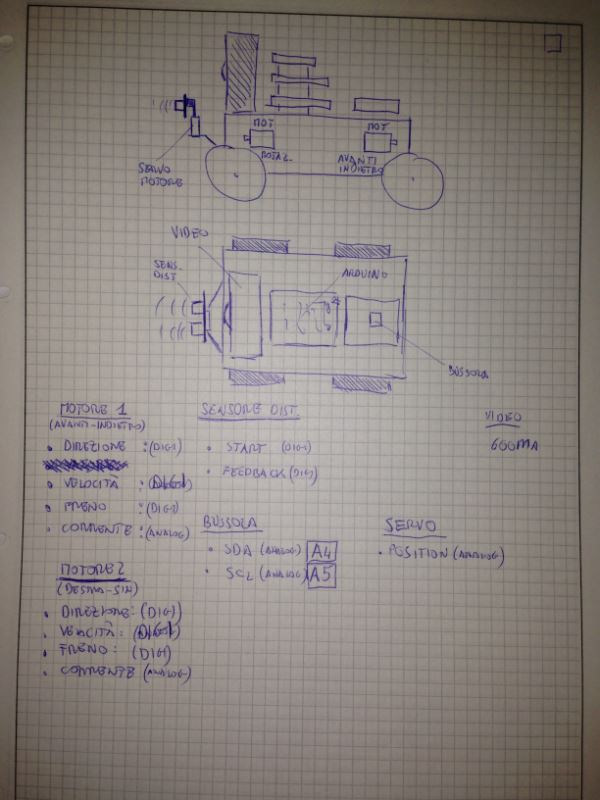
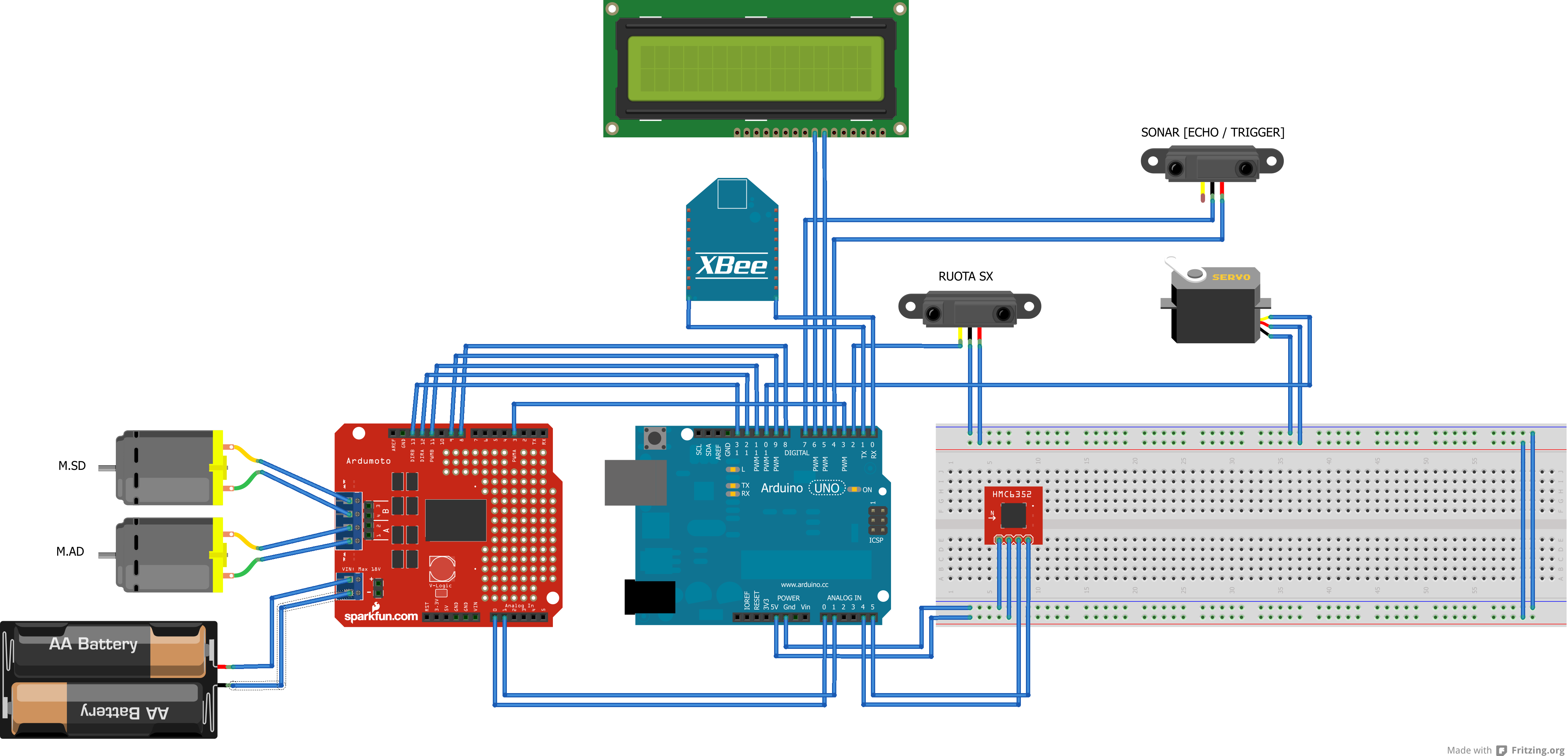
A questo scopo ho preparato anche uno schema dove ho riportato un po' tutti i collegamenti del mio progetto, alcuni collegamenti sono approssimativi per mancanza del disegno del componente corretto (ad esempio il display LCD), ma in linea di massima i collegamenti corrispondono.
Questo lo schema del progetto:
La tabella seguente mostra l'attribuzione delle rispettive porte con arduino, questo è molto importante in quanto tutto il software si riferisce a questa configurazione. Inoltre va ricordato che alcune porte di Arduino sono particolari e non possono essere invertite. Mi riferisco ad esempio alle funzioni PWM, disponibili soltanto su alcune porte o alle porte per la comunicazione tramite porta I2C.
| Progetto Big Wheely | |
| V1.0 | |
| Pin | Descrizione |
| D0 | RX Xbee Serial wireless |
| D1 | TX Xbee Serial wireless |
| D2 | Infrared rotazione Ruota SX [S.SX] |
| D3 | PWM AD - Rotor Shield |
| D4 | Trigger - HCRS04 Sonar distance |
| D5 | RX LCD display |
| D6 | TX LCD display |
| D7 | Echo - HCRS04 Sonar distance |
| D8 | Brake SD - Motor shield |
| D9 | Brake AD - Motor shield |
| D10 | Servo rotaz. Dist. Sonar |
| D11 | PWM SD - Motor shield |
| D12 | Direction AD - Motor shield |
| D13 | Direction SD - Motor shield |
| A0 | Current sensing AD - motor shield |
| A1 | Current sensing SD - motor shield |
| A2 | |
| A3 | |
| A4 | SDA (DATA) Bus I2C Compass |
| A5 | SCL (Clock) Bus I2C Compass |
Contrariamente a quanto iniziamente avevo pensato, il numero di porte disponibile su questo modello di Arduino non è così eccessivo. Sono infatti tutte utilizzate, ad eccezione di un paio di porte analogiche che però intendo sfruttare in futuro per il collegamento di pulsanti o altri sensori.
| [ ] | 10 kB |