
Molti progetti che ho visto in rete approssimano lo spostamento in avanti e indietro utilizzando il TEMPO come unità di riferimento.
Questo metodo è davvero molto approssimativo, la velocità del motore, lo sforzo che esso compie in base al tipo di terreno possono alterare notevolmente lo spazio percorso.
Questo tipo di accorgimento dovrebbe darmi delle informazioni utili per determinare lo spazio percorso.
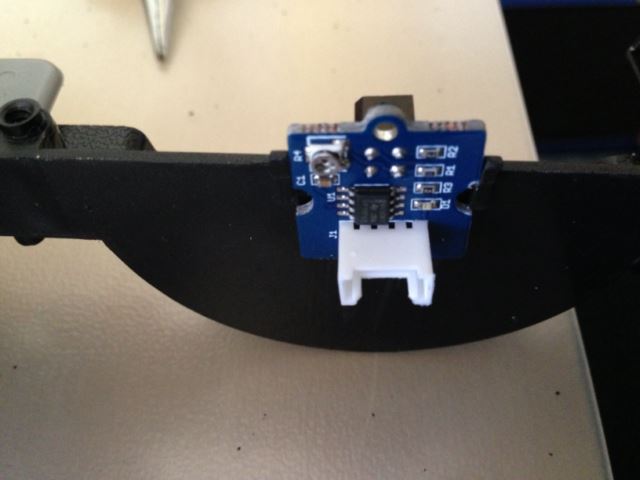
Questo tipo di sensore si basa sulla riflessione del segnale emesso, in particolare funziona bene se c'è molto contrasto tra lo stato logico 1 e lo stato logico 0.

Ho installato 2 sensori a infrarossi di questo tipo in prossimità delle ruote posteriori.
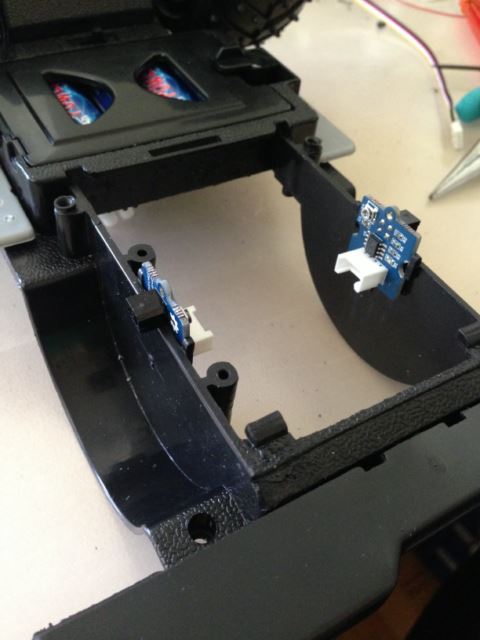
I sensori si adattano perfettamente con delle linguette già presenti nella scocca di plastica. Per fissare meglio il tutto ho aggiunto una vite.

Il sensore dispone di un trimmer per regolare la sensibilità e un LED che mostra se lo stato è ATTIVO o NON ATTIVO.
Mentre l'alloggiamento di un sensore è già perfetto così, per l'altro (a destra nella foto) è stato necessario rimuovere un tassello originariamente utilizzato per fissare la carena della macchina.
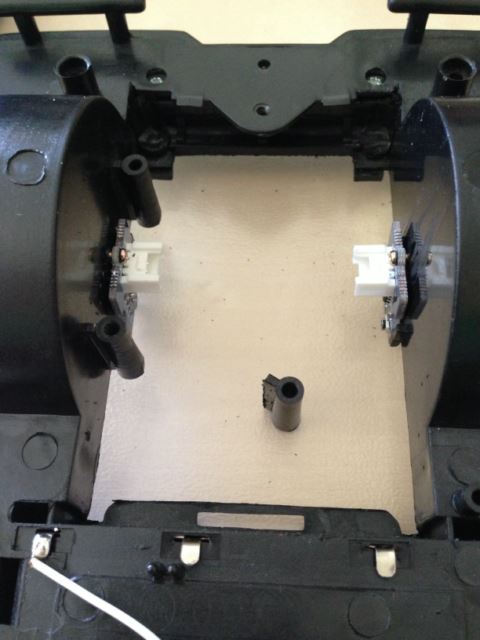
 Prima di rimontare le grandi ruote di BigWheely ho colorato una sezione di bianco utilizzando il "Tippex" (pennello per correggere gli errori sui fogli).
Prima di rimontare le grandi ruote di BigWheely ho colorato una sezione di bianco utilizzando il "Tippex" (pennello per correggere gli errori sui fogli).
Per ora ho pitturato soltanto un piccola sezione di ruota, in questo modo viene inviato un impulso ad Arduino ogni volta che la ruota effettua un giro completo.
È possibile che in futuro aumenterò il numero di segmenti bianchi, in modo da poter ottenere una precisione più accurata della rotazione delle ruote.
